Un controllore PID può essere velocemente implementato con l'uso di un amplificatore operazionale ed un paio di resistenze e condensatori:

Partendo dalla configurazione invertente mostrata in figura:
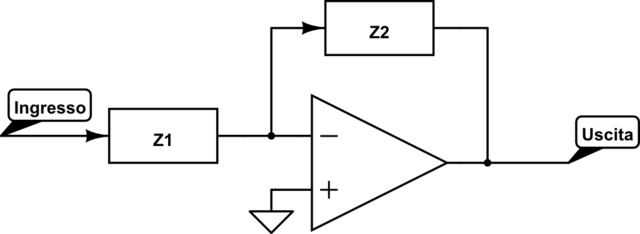
la quale presenta la funzione di trasferimento:
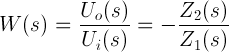
è possibile ricavare la funzione di trasferimento del circuito del PID:

Questa funzione di trasferimento si può ricondurre alla forma di Bode generale:

la quale può essere rappresentata approssimativamente con i diagrammi asinsotici di Bode tenendo conto dei due zeri (che generano due punti di spezzamento) e del polo (nell'origine).
Ovviamente:

I due punti di spezzamento si posizionano nel diagramma asintotico di Bode alle pulsazioni:
